



Affichage des résultats 1 à 35 sur 35
-
25/01/2013, 12h46 #1Administrateur - Fondateur - Propriétaire


- Inscription
- mars 2004
- Localisation
- Belgique / France
- Messages
- 5 964
- Boîtier
- EOS R7 * EOS 650D
- Objectif(s)
- Canon
Mes photos publiées
 [Aeromodelisme] Déclenchement et retour à distance
[Aeromodelisme] Déclenchement et retour à distance
Passionné de la photo, j'ai également la passion depuis des années de l’aéromodélisme.
J'ai donc rassemblé les deux en y apposant une caméra bien connu sur un de mes engins de vol:

- EXIF: Canon ( EOS 5D Mark III) | 105mm | 1/200s | f/5.6 | ISO 100
Par tout un système d’émetteur/récepteur vidéo cela me permet de voler en immersion à plusieurs kilomètres tout en ayant un retour vidéo dans mes lunettes/moniteur
Tout cela fonctionne très bien avec la caméra qui est embraquée car elle est prévu pour çà.
Là ou je veux en venir, c'est que je voudrai filmer et prendre des photos avec un Eos (650D) monté sur l'engin.
Je cherche donc un moyen d'avoir avec l'Eos:
un retour vidéo au sol avec le live view
Avoir la possibilité de régler et déclencher à distance.
Si vous avez des infos.
Merci

La lecture est un stratagème qui dispense de réfléchir. [/SIZE]
-
25/01/2013, 13h27 #2Membre
- Inscription
- mai 2007
- Localisation
- Poitou
- Âge
- 62
- Messages
- 6 472
- Boîtier
- 7, 1.4, 21 ... heu 5.3 ....et les pepes
- Objectif(s)
- 300 2.8, 70-200, 100-400, 24-105, 135 2, 100m ....
Retour video par la prise hdmi possible et commande par Usb, j'ai vu des transceivers radio pour ce signaux mais rares, souvent gros (lourds) et valant la peau des fesses. Et cela ne gérera pas la focale du zoom si zoom. Utiliser la sortie video est facile (je ne sais pas ce que cela sort hors visualisation photo) mais va bloquer le port usb sur pas mal de boitiers.un retour vidéo au sol avec le live view
Avoir la possibilité de régler et déclencher à distance.
Sinon il y a toujours la possibilité pas chère de "hacker" (pour faire geek) le boitier, en plaçant en parallèle des boutons les sorties d'un microcontrolleur, meme l'affichage LCD doit pouvoir etre doublé, par contre plus gros boulot de développement
-
25/01/2013, 17h56 #3Membre

- Inscription
- septembre 2009
- Localisation
- paris
- Âge
- 40
- Messages
- 603
- Boîtier
- 5DMark III+grip-600exRT-2x430EX II-STE-2
- Objectif(s)
- 8-15L - 24-105 F4L - 85mm 1.2L - MPE-65-100mm F2,8L Macro - 70-200 F2,8L II -TC x2III
voila une discution qui va m'interessé, je voudrai baucoup faire de même, je suis entrain de regarder ce qui serai bien
ton chassis a l'air d'etre celuis d'un DJI par contre c'est étonnant cette config du double moteur sur chaques ailes, il est stable?
tu est de quelle region(en MP si tu veux) ?
j'ai vue un DJI phantom qui a l'air pas mal ou justement un kit complet F450 + radio NAZA et GPS
-
25/01/2013, 20h22 #4Administrateur - Fondateur - Propriétaire
- Inscription
- mars 2004
- Localisation
- Belgique / France
- Messages
- 5 964
- Boîtier
- EOS R7 * EOS 650D
- Objectif(s)
- Canon
Mes photos publiées
Le chassis est celui du 550 modifié pour le monter en Y6 Envoyé par jujernault
Envoyé par jujernault

Il y a donc 6 moteurs sur les 3 bras en Y (2 par bras)
Je suis du nord de la France (au alentour de Valencienne) et du Sud Ouest de la Belgique c'est selon..
Il est équipé DJI GPS etc...
Pour la stabilité, je te laisse le soin de faire ton propre avis avec une de mes vidéos (MP)
Le DII phantom est pas mal mais un peu bridé, je te conseillerai plus l'ensemble F450 Dji Naza GPS. Je possède ce modèle comme le F330.
Edit: Y6 vu de dessus.

(Photo prise avec un phone)
La lecture est un stratagème qui dispense de réfléchir. [/SIZE]
-
26/01/2013, 00h02 #5Abonné

- Inscription
- juillet 2008
- Localisation
- Avignon
- Âge
- 43
- Messages
- 6 203
- Boîtier
- AE1 program, 400D + 5D² + 7D, x100T, ...
- Objectif(s)
- Samyang : 14 f/2.8 - Canon : 40 f/2.8 | 50 f/1.8 II | 85 f1/8 | 100 f/2.8 | 135 f/2 L
Baylyns : je ne vais pas répondre à ta question (n'ayant pas la réponse), mais ta vidéo est mortelle !!!! Si tu en as d'autres, je suis preneur.

Peux-tu faire une petite parenthèse sur cet espèce de drone et nous en dire plus STP ? Ca m'intéresse. Autonomie ? Portée ? Bruyant ? Parachute de secours ? Fourchette tarifaire, etc... ?
? Fourchette tarifaire, etc... ?
Concernant le sujet, j'ai vu, un jour, un reportage sur les paparazzis. Ils montraient notamment des jeunes qui avaient équipé un drone d'un appareil réflex (ou compact, je ne me souviens plus trop) déclenché à distance. Si mes souvenirs sont bons, le retour vidéo était obtenu grace à la caméra vidéo. Ce qui donne un cadrage approximatix.
Une solution : mettre en place une deuxième caméra vidéo, orientée vers le sol, qui remplacerait le retour vidéo de l'EOS.
Ta caméra principale étant visiblement orientée différemment, afin de te guider durant la phase de vol.
Dans cette vidéo le jeune a crée une télécommande radio afin de déclencher son appareil photo à distance.
Soit tu la fabriques par tes propres moyens, en modifiant une télécommande filaire RS-60 pour EOS, soit tu en achètes une de ce genre :

Cependant, la portée n'est "que" de 100m...
EDIT : visiblement, il existe une télécommande AVEC liveview créée par "Aputure" et s'appelant "Gigtube DSLR Wireless Viewfinder II" (modèle "GWII-C3" pour le 650D)...
-
26/01/2013, 03h39 #6Membre

- Inscription
- août 2010
- Localisation
- st lô / Manche
- Âge
- 61
- Messages
- 149
- Boîtier
- canon
- Objectif(s)
- 80ed orion etc

superbe réalisation on aimerait en voir plus sur ce drone
tu parles certainement de cela et ils utilisent un 550D sur la deuxième vidéo Envoyé par Cunione
Drone : paparazzis nouvelle génération - Vidéo Dailymotion
Paparazzis et leur Mikrokopter.wmv - YouTube
A+ serge
serge
-
26/01/2013, 08h38 #7Membre

- Inscription
- juillet 2011
- Localisation
- Lyon
- Messages
- 881
- Boîtier
- FF et APS-C
- Objectif(s)
- un objectif pour les dominer tous ....
c'est chaud pour eux.... ils ont faillit se faire dépouiller les paparazzis en herbes ......
-
26/01/2013, 08h50 #8Abonné
- Inscription
- juillet 2008
- Localisation
- Avignon
- Âge
- 43
- Messages
- 6 203
- Boîtier
- AE1 program, 400D + 5D² + 7D, x100T, ...
- Objectif(s)
- Samyang : 14 f/2.8 - Canon : 40 f/2.8 | 50 f/1.8 II | 85 f1/8 | 100 f/2.8 | 135 f/2 L
Merci Serge, c'est tout à fait cette vidéo là dont je parlais.
J'avais oublié que le plateau pour l'appareil photo était aussi télécommandé.
C'est une idée à explorer Baylyns. Par contre, il risque de se poser un hic : il faudra être deux pour piloter tout ça.
A moins que ton «drone» puisse effectuer un vol stationnaire SANS que tu n'ai à toucher la télécommande ?
-
26/01/2013, 20h44 #9Membre
- Inscription
- juin 2011
- Localisation
- Verdun
- Âge
- 72
- Messages
- 258
- Boîtier
- Canon EOS 60D +550ex +panosaurus
- Objectif(s)
- EFS 15/85 + EF 70/300DO + Samyang 8mm f3.5
Bonsoir,
En tant qu'informaticien, j'aurai tendance à répondre à cette problématique par une solution standardisée de ce type pouvant ultérieurement être optimisée dans les composants et le poids, mais où la majorité des fonction serait assurée par des logiciels, donc avec une masse (virtuelle !) nulle.
Cela pourrait passer par une carte mère de récupération d'un notebook dont l'écran serait foutu (tombé = cassé), voire par une mini carte mère de type mini_itx, ou tout autre idée de machine très petite embarquable.
On peut éventuellement remplacer le disque dur d'origine par un petit SSD. Pour le système d'exploitation, un vieux XP ou un win 7 ferait l'affaire.
Cet élément embarqué doit posséder une connexion Wifi, et on y met une petite antenne omnidirectionnel de type +4 à 8 db pour plus de sensibilité.
Pour la station de base au sol, il faut disposer d'un ordi correct, mais même en portable, cela existe
L'antenne du sol pourrait être une sectorielle (avec pré ampli, malgré que ce soit interdit) avec aussi un gain de 8 à 10 db. L'axe orthogonal au plan plat de l'antenne vise la zone où évolue l'hélico (avec ce genre de matos, j'ai fais il y a quelques années, une liaison wifi de 2 km de portée)
Une fois ces préceptes techniques techniques résolus, il ne reste plus qu'à créer un réseau informatique avec prise de contrôle du poste embarqué (qui ne nécessite pas d'écran) par le micro ordinateur du sol, via un bureau à distance ou une prise de contrôle genre VNC.
Il reste à implanter un EOS utility pour pouvoir piloter la prise de vue.
Bon, c'est sûr que c'est une prospective, mais s'appuyant sur des points qui sont tous validés, la consolidation de l'ensemble devrait se faire sans pb. Compte tenu des différentes sources électriques (les moteurs, caméra, micro PC, appareil photo, il faudrait peut-être mutualiser la consommation de tous ces besoins, et suivre la consommation ou la durée restante via un autre logiciel embarqué gérable depuis le sol.
Bon, maintenany vous pouvez aussi demander aux équipes techniques de France télévision comment ils font, puisque par exemple l'émission "des racines et des ailes" semble faire une grosse utilisation de ces drones qui filment
-
26/01/2013, 20h52 #10Administrateur - Fondateur - Propriétaire
- Inscription
- mars 2004
- Localisation
- Belgique / France
- Messages
- 5 964
- Boîtier
- EOS R7 * EOS 650D
- Objectif(s)
- Canon
Mes photos publiées
Merci mybrother, par contre j'ai un peu de doute sur la portée du Wifi ou j'aimerai quand même assurer entre 150 et 300m ?
La lecture est un stratagème qui dispense de réfléchir. [/SIZE]
-
26/01/2013, 21h19 #11Membre
- Inscription
- juin 2011
- Localisation
- Verdun
- Âge
- 72
- Messages
- 258
- Boîtier
- Canon EOS 60D +550ex +panosaurus
- Objectif(s)
- EFS 15/85 + EF 70/300DO + Samyang 8mm f3.5
Non pas de pb, je confirme avoir fait il y a quelques années une liaison de 2 km entre 2 batiments : le but était de télésurveiller ce qui se passait dans le batiment éloigné via des caméra interne, et dans la journée, d'y recevoir internet. Envoyé par Baylyns
Bien évidemment, il faut utiliser des antennes comme indiqué pour obtenir un gain de plusieurs dB sur les antennes tant en émission qu'en réception.
bien sûr, on est en dehors des normes de télétransmission Wifi (donc pénalisable), mais c'est pas grave, car Orange le fait déjà avec ses Livebox pro : en effet, quand ils implantent ces livebox dans les hotels pour "offrir" la wifi aux clients, ils utilisent des circuits Wifi plus puissants que la livebox pour les lamba, afin de couvrir plusieurs centaines de metres y compris en intérieur.
La seule chose à savoir est que le train d'onde entre les 2 antennes à la forme grosso modo d'un ballon de rugby, dont le diamètre à mis parcours peut atteindre 20 à 30 mètres de diamètre.
Donc si ton drone est directement en vue, mais juste au dessus d'une ligne d'arbres, les ondes frappant le feuillage vont rebondir vers le ciel, et cela donnera une perte de puissance à la liaison wifi. mais si depuis le sol, tu vise à 25/30° pour atteindre ton drône, il ne devrait pas y avoir de pb.
D'autre part, c'est le pilotage de la caméra, ce n'est pas aussi stratégique que la stabilisation, donc, dans le pire des cas, en te déplacant de quelques mètres, tu retrouvera le réseau wifi, sachant qu'entre temps, si la commande de filmer a été lancée via OES utility, elle continuera toujours
-
27/01/2013, 00h41 #12Abonné
- Inscription
- juillet 2008
- Localisation
- Avignon
- Âge
- 43
- Messages
- 6 203
- Boîtier
- AE1 program, 400D + 5D² + 7D, x100T, ...
- Objectif(s)
- Samyang : 14 f/2.8 - Canon : 40 f/2.8 | 50 f/1.8 II | 85 f1/8 | 100 f/2.8 | 135 f/2 L
J'adore les informaticiens : pourquoi faire simple quand on peut faire compliqué !
Je pense tout de même que ma solution reste la plus simple et la moins galère à réaliser.
De plus, ta carte mère, faut l'alimenter ?
En gros, tu parles d'un Netbook mais sans son boîtier ? Envoyé par mybrother
Ca risque de faire lourd tout ça, en plus du 650D...
Un casse-tête quand même cette histoire.
Mon idée de déclencheur à distance peut être sympa... mais la portée risque d'être trop faible.
A moins que l'on puisse simplement changer l'antenne par une plus longue... Est-ce techniquement possible ou bien plus l'antenne de réception est longue plus elle aura besoin de puissance ?
De plus, les rotors ne crééront-ils pas des perturbations radio ?
-
27/01/2013, 08h40 #13Membre

- Inscription
- janvier 2006
- Localisation
- Haute-Normandie
- Messages
- 209
- Boîtier
- 300D+50D (+ixus 800is)
- Objectif(s)
- de 24 à 400mm tout en Canon

Bonjour a vous.
J'suis pas un grand spécialiste en informatique même si j'en ai fait une partie de mes études.
Mais je m'y remette tout doucement. Avec un projet ressemblant mais pour de la photo aérienne par cerf-volant.
Et il y a quelque temps est sortie sur le marché la raspberry pi qui est un mini PC qui tourne sous un dérivé de Linux. Cette carte comprend des port entrée sortie qui normalement ( j'suis encore en phase de ré apprentissage de Linux) permet de piloter directement des servo moteur ( par exemple),...
Et cerises sur le gâteaux cela pèse moins de 50g ( poids de mon exemplaire).
Le site de la fondation : http://www.raspberrypi.org/
-
27/01/2013, 08h47 #14Abonné

- Inscription
- janvier 2008
- Localisation
- Sologne
- Âge
- 60
- Messages
- 30 222
- Boîtier
- 7D MK II,1DS MK II,50D, 400D
- Objectif(s)
- 28 2.8/50 1.4/85 1.8/100 2.8/135 2.8 SF/28-75/24-105L/70-200 L f4/200 2.8 L/120-400
Mes photos publiées
Tu as la solution Phottix Hero Live View, mais la porté n'est pas super ...
Batterie 2 x 3.7V 1300 mAh Li-Ion
Alimentation 2 x 5V 1000mA AC/DC adaptor
Émetteur avec caméra intégrée
Récepteur avec écran couleur 2.4" LCD
Cable 7 câbles optionnels
Garantie 24 mois
Fréquence 433MHz, 2.4GHz
Interférence Haute résistance
Modes Délai de 2 secondes
Portée Jusqu'à 100 mètres
-
27/01/2013, 10h04 #15Membre
- Inscription
- juin 2011
- Localisation
- Verdun
- Âge
- 72
- Messages
- 258
- Boîtier
- Canon EOS 60D +550ex +panosaurus
- Objectif(s)
- EFS 15/85 + EF 70/300DO + Samyang 8mm f3.5
Pourquoi cette remarque à priori négative : cette solution me semble au contraire la plus simple, car la plus universelle, donc évolutive dans le temps, y compris pour d'autres besoins embarqués Envoyé par Cunione
Avec tout le matériel nécessaire monté, il ne faut pas plus d'une heure de paramétrage pour que cela fonctionne
Et alors ?, la sustentation par 6 rotors, la gestion de la gopro à distance en video, l'eos 650D, ils fonctionnent comment ? avec des élastiques peut-être ? Envoyé par Cunione
Créer un point d'alimentation supplémentaire me semble peanut par rapport aux rotors, et cela serait au contraire, le moyen de mutualiser l'ensemble des besoins electriques.
Je vous rappel que dans cette solution, vous voyez sur l'écran du sol, via EOS utility ce que film réellement le boitier.
Maintenant, si c'est plus simplement le pilotage de déclenchement, il existe des solutions plus simples de télécommande de n'importe quoi via un arduino qui serait piloté en wifi, mais dans ce cas, pas de feed back de l'action à l'écran
Certains connaissent peut-être la gamme des Arduino qui sont des microcontrôleurs en language machine (mais accessible sous forme d'un c++), utilisés par exemple pour automatiser des prises de vue de gouttes d'eau, faire du focus-stacking, mais aussi pour du pilotage de robot, avec une certaine capacité décisionnelle locale basée sur des capteurs ou un module GPS. Ces contrôleurs pèsent quelques grammes et disposent aussi d'un pilotage Wifi.
-
27/01/2013, 10h18 #16Abonné
- Inscription
- juillet 2008
- Localisation
- Avignon
- Âge
- 43
- Messages
- 6 203
- Boîtier
- AE1 program, 400D + 5D² + 7D, x100T, ...
- Objectif(s)
- Samyang : 14 f/2.8 - Canon : 40 f/2.8 | 50 f/1.8 II | 85 f1/8 | 100 f/2.8 | 135 f/2 L
Mybrother : mon commentaire était humoristique, que l'on soit clairs.
L'EOS et les rotors sont alimentés par des batteries.
Alors, à moins de brancher la carte sur d'autres batteries, car (je ne suis pas informaticien ni électronicien mais) je ne pense pas que les batteries du drone soit assez puissantes pour alimenter en plus un petit ordi. Si c'est possible, alors je dis bingo !
Là, ça dépasse les qualités intellectuelles.
Reste à savoir, si avec tout ce poids, l'engin pourra supporter tout ce poids sans peine...?
Bonne journée.
-
27/01/2013, 10h22 #17Membre
- Inscription
- juin 2011
- Localisation
- Verdun
- Âge
- 72
- Messages
- 258
- Boîtier
- Canon EOS 60D +550ex +panosaurus
- Objectif(s)
- EFS 15/85 + EF 70/300DO + Samyang 8mm f3.5
A mon tour de poser une question à Baylyns :
ce genre de matériel volant d'intéresse aussi, vu que j'aurai bientôt 60 ans ...
Donc, ton drone pssède 3 bras avec chacun 2 moteurs inversés : quel est l'avantage de ce principe par rapport aux 6 bras avec chacun un moteur de sustentation ?
De mes souvenirs, il semble que chaque rotor se comporte comme une aile, cad elle créée une dépression sustentatoire au-dessus, compensée par une surpression en dessous. Mais quid de l'hélice inférieure : pour faire sa propre sustentation, elle est obligé de travailler sur une veine d'air en surpression créée par le moteur supérieur, non ?
Je sais bien qu'aux débuts de l'aviation, on utilisait des biplans, voire plus du côté allemand, mais tout le monde est maintenat revenu au monoplan sustentatoire, y compris pour les attaques lentes comme les deltaplanes motorisés
-
27/01/2013, 11h04 #18Membre
- Inscription
- mai 2007
- Localisation
- Poitou
- Âge
- 62
- Messages
- 6 472
- Boîtier
- 7, 1.4, 21 ... heu 5.3 ....et les pepes
- Objectif(s)
- 300 2.8, 70-200, 100-400, 24-105, 135 2, 100m ....
Consommation et poids trop important pour de l'embarqué, comme l'a dit yoyo un mini linux raspberry serait plus adapté a ce genre d'application mais il faudra devellopper les drivers, et faire tourner un eos utility sous un linux lourd et wine il ne va pas apprécier.Cela pourrait passer par une carte mère de récupération d'un notebook dont l'écran serait foutu
Antennes directionnelles, ton "ballon de rugdby" a ete sacrement étiré, inapplicable dans ce cas de figure, uniquement de l'omni a moins que veuille faire un asservissement de position d'antenneNon pas de pb, je confirme avoir fait il y a quelques années une liaison de 2 km entre 2 batiments
HSEncombrement, et contrairement a ce que tu peux penser le systeme contrarotatif peut avoir un rendement plus important qu'un double système mono hélice, le flux d'air en sortie etant redressé tu n'a plus d'energie de perdue dans la composante helicoidale. Cela a ete adopté rarement sur avion a cause des contraintes mecanique du double reducteur, cela n'etait fait que dans les cas ou la puissance du moteur aurait demandé un diametre de pale trop important. Les helices type turbo fan, cimeterre ont améliore les choses mais il me semble bien que c'est encore le bear qui a la palme du rendement. De plus tu a moins de contraintes sur les bras de liaison ou le fuselage les couples des helices s’annulant: quel est l'avantage de ce principe par rapport aux 6 bras avec chacun un moteur de sustentation ?
HS2Pas le même problème. On croyait a l’époque que plus il y en avait mieux c’était, tu eu même des trucs a persiennes avec un bonne dizaine d’étages, mais cela pénalise fortement la trainée, une aile a grand allongement est bien meilleure (type planeur) mais pose des soucis de conception du longeron. Par contre tu perd en taux de roulis (logique) d'ou les spit a ailes croppé ou plus récent le Pitts un des rares biplan "modernesJe sais bien qu'aux débuts de l'aviation, on utilisait des biplans, voire plus du côté allemand, mais tout le monde est maintenat revenu au monoplan sustentatoire," de voltige
-
27/01/2013, 11h11 #19Membre
- Inscription
- mai 2007
- Localisation
- Poitou
- Âge
- 62
- Messages
- 6 472
- Boîtier
- 7, 1.4, 21 ... heu 5.3 ....et les pepes
- Objectif(s)
- 300 2.8, 70-200, 100-400, 24-105, 135 2, 100m ....
La portée cela doit pouvoir se bricoler, en remplaçant l'emetteur (quoique il semble en avoir 2, un montant en 433 pour la télécommande l'autre descendant en 2.4G pour la video)Tu as la solution Phottix Hero Live View, mais la porté n'est pas super ...
Le soucis est que si j'ai bien compris Baylyns voulait le contrôle complet de l'apn, y compris les réglages et pas seulement le déclenchement. Dans le cas contraire il n'a qu'a trouver et adapter un petit adaptateur video radio, cela se trouve pour quelques dizaines d'euros, la commande de l'apn étant fait par une voie libre de sa RC principale
-
27/01/2013, 11h17 #20Abonné
- Inscription
- janvier 2008
- Localisation
- Sologne
- Âge
- 60
- Messages
- 30 222
- Boîtier
- 7D MK II,1DS MK II,50D, 400D
- Objectif(s)
- 28 2.8/50 1.4/85 1.8/100 2.8/135 2.8 SF/28-75/24-105L/70-200 L f4/200 2.8 L/120-400
Mes photos publiées
Le plus simple serait ptet d'attendre un peu, vont bien sortir le 70D (Ca bruisse qu'il soit Wifi ...)
-
27/01/2013, 11h19 #21Membre

- Inscription
- avril 2012
- Localisation
- IDF
- Âge
- 44
- Messages
- 757
- Boîtier
- Canon / Fuji
- Objectif(s)
- Ça va et ça vient
Le wifi ça marche très bien (pour info le record de distance d'une connection wi-fi c'est plus de 380 km)
Mais comme dit au dessus, le souci, c'est que passé quelques dizaines de mètres, il faut des antennes directionnelles. Et plus on a besoin d'aller loin plus le champ est réduit.
Et autant le directionnel c'est très bien pour faire de l'élongation entre deux bâtiments, autant pour suivre un modèle RC ça me semble un peu compliqué.
-
27/01/2013, 11h28 #22Membre
- Inscription
- septembre 2009
- Localisation
- paris
- Âge
- 40
- Messages
- 603
- Boîtier
- 5DMark III+grip-600exRT-2x430EX II-STE-2
- Objectif(s)
- 8-15L - 24-105 F4L - 85mm 1.2L - MPE-65-100mm F2,8L Macro - 70-200 F2,8L II -TC x2III
je penche aussi sur le F450 a tu un site pour commandé le kit entier? (boitier radio,naza,gps, et le kit f450+moteur)?
-
27/01/2013, 11h56 #23Administrateur - Fondateur - Propriétaire
- Inscription
- mars 2004
- Localisation
- Belgique / France
- Messages
- 5 964
- Boîtier
- EOS R7 * EOS 650D
- Objectif(s)
- Canon
Mes photos publiées
L'avantage des 6 moteurs inversés sur les 3 bras c'est qu'en cas de coupure d'un moteur ou une hélice qui casse, je sais revenir sur 5 moteurs, alors qu'avec 6 bras et 6 moteurs c'est quasi impossible (J'ai testé). Il faut pour ça voler avec 8 bras et 8 moteurs. Envoyé par mybrother
Pour les moteurs:
Les 3 du haut tournent dans le sens horaire
Les 3 du dessous tournent dans le sens ant-horaire mais avec les hélices inversés comme les moteurs du haut.
La lecture est un stratagème qui dispense de réfléchir. [/SIZE]
-
27/01/2013, 11h58 #24Administrateur - Fondateur - Propriétaire
- Inscription
- mars 2004
- Localisation
- Belgique / France
- Messages
- 5 964
- Boîtier
- EOS R7 * EOS 650D
- Objectif(s)
- Canon
Mes photos publiées
Je te contacte en Mp Envoyé par jujernault
La lecture est un stratagème qui dispense de réfléchir. [/SIZE]
-
27/01/2013, 11h58 #25Membre
- Inscription
- septembre 2009
- Localisation
- paris
- Âge
- 40
- Messages
- 603
- Boîtier
- 5DMark III+grip-600exRT-2x430EX II-STE-2
- Objectif(s)
- 8-15L - 24-105 F4L - 85mm 1.2L - MPE-65-100mm F2,8L Macro - 70-200 F2,8L II -TC x2III
Merci baylyns
-
27/01/2013, 12h16 #26Administrateur - Fondateur - Propriétaire
- Inscription
- mars 2004
- Localisation
- Belgique / France
- Messages
- 5 964
- Boîtier
- EOS R7 * EOS 650D
- Objectif(s)
- Canon
Mes photos publiées
L' engin modifié en Y6 que je possède en démonstration:
La lecture est un stratagème qui dispense de réfléchir. [/SIZE]
-
27/01/2013, 12h20 #27Membre
- Inscription
- septembre 2009
- Localisation
- paris
- Âge
- 40
- Messages
- 603
- Boîtier
- 5DMark III+grip-600exRT-2x430EX II-STE-2
- Objectif(s)
- 8-15L - 24-105 F4L - 85mm 1.2L - MPE-65-100mm F2,8L Macro - 70-200 F2,8L II -TC x2III
j'adore, sa ta couté combien le tout?
-
27/01/2013, 12h26 #28Abonné

- Inscription
- avril 2005
- Localisation
- France
- Messages
- 13 986
- Boîtier
- Canon
- Objectif(s)
- Canon EF
Moi, je pige rien à votre conversation, mais tant pour le coté technique que pour le fun que ça doit procurer, je vous lis avec beaucoup d'intérêt
Perso, j'ai acheté presque par hasard, un petit Comete 3.5 en grande surface (30 promo de Noël), et c'est déjà bien rigolo.

-
27/01/2013, 13h18 #29Membre

- Inscription
- mai 2007
- Localisation
- Nantes
- Messages
- 54
- Boîtier
- 5D
- Objectif(s)
- 24-105 F4 L / 70-200 F4L / 50mm 1.8 II / 100mm 2.8 macro
j'ai récement découvert un photographe, Stéphane Compoint, qui fait de la photo aérienn de 5 à 500 mètres par ballon captif commandé à distance, ça peut t'inspirer éventuellement ????
stephanecompoint.com
Bon dimanche,
Nicolas
-
27/01/2013, 13h23 #30Membre
- Inscription
- septembre 2009
- Localisation
- paris
- Âge
- 40
- Messages
- 603
- Boîtier
- 5DMark III+grip-600exRT-2x430EX II-STE-2
- Objectif(s)
- 8-15L - 24-105 F4L - 85mm 1.2L - MPE-65-100mm F2,8L Macro - 70-200 F2,8L II -TC x2III
j'ai vue un homme qui travaille aussi comme ca a coté de mon travail, je sait pas si c'est pour la municipalité etc
je l'ai pris en photo : https://www.facebook.com/photo.php?f...type=3&theater
-
27/01/2013, 14h01 #31Abonné

- Inscription
- août 2007
- Localisation
- Territoire de Belfort
- Âge
- 82
- Messages
- 8 070
- Boîtier
- Canon
- Objectif(s)
- Canon - Tamron
Attention a la règlementation !
A la suite de plaintes pour atteinte à la vie privée de la part de certains qui ont commis des abus en photographiant au dessus de propriétés privées avec ce type d'engin, les pouvoirs publics en ont règlementé l'utilisation. L'arrêté du 11 avril 2012 a été publié au journal officiel le 10 mai 2012.
En prendre connaissance avant d'utiliser un drone pour la photo à des fins amateur est un rempart contre les poursuites qui pourraient être engagées de la part de ceux qui n'apprécient pas le viol de leur intimité.
Réglementation et legislation des drones et civil
-
27/01/2013, 14h04 #32Membre

- Inscription
- novembre 2005
- Localisation
- Woincourt 80520 France
- Âge
- 72
- Messages
- 505
- Boîtier
- S90, 400D, 7DII, 5D III, 1DXII
- Objectif(s)
- Canon 50f1,8;70/200,300,500f:4 L;135f2 L;ext 1,4 ;100 f:2,8;Sig 17/70 ; Tokina 11/16
Bonjour à tous
Il existe des ensembles émetteur/récepteur en 2,4 ghz, cela fonctionne parfaitement bien
Je les utilise depuis de nombreuses années en photo aérienne par cerf-volant, j'utilise la sortie vidéo du conpact
Pour le déclenchement de l'appareil j'appuie sur le bouton avec un micro servo tout simplement
une idée de la nacelle 860 gr en ordre de marche
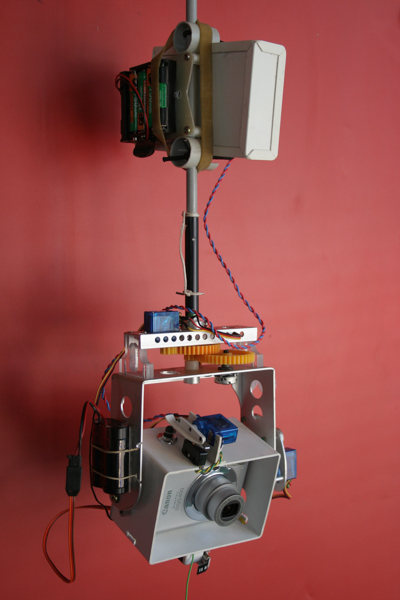
- EXIF: Canon ( EOS 350D DIGITAL) | 33mm | 1/200s | f/4.5 | ISO 400
-
27/01/2013, 14h05 #33Administrateur - Fondateur - Propriétaire
- Inscription
- mars 2004
- Localisation
- Belgique / France
- Messages
- 5 964
- Boîtier
- EOS R7 * EOS 650D
- Objectif(s)
- Canon
Mes photos publiées
Merci Roland, je connais évidement cette réglementation, bien que je vole plus souvent en Belgique. Envoyé par Kinggarden
La lecture est un stratagème qui dispense de réfléchir. [/SIZE]
-
27/01/2013, 15h34 #34Membre

- Inscription
- septembre 2010
- Localisation
- 48°35'04''N 7°44'55''E
- Âge
- 49
- Messages
- 5 008
- Boîtier
- 5D III | 430 EX II
- Objectif(s)
- 50 | 24-105 | 70-200 | ex 2
Je pense que c'est plus un truc de ce genre qui tintéresse, mais la porté n'est que de 60 m. A voir pour amplifier le signal.
Hahnel Innovative Accessories
(c'est pas un site marchand, hein!?, juste le fabricant!)
-
30/01/2013, 00h20 #35Membre
- Inscription
- janvier 2013
- Localisation
- Seine Maritime
- Âge
- 50
- Messages
- 29
- Boîtier
- EOS 650D
- Objectif(s)
- 17 à 300
Bonjour à tous,
je lis avec retard ce post.
Je fais de l'immersion RC depuis un bout de temps maintenant.
Alors, si je peux énoncer quelques conseils dont je n'ai pas le monopole évidemment...
- Le 2.4 Ghz est à éviter absolument avec une radio RC moderne qui est également en 2.4 Ghz. Le risque n'est pas trop de planter le modèle RC (quoique), mais de se retrouver sans vidéo (génant en total immersion) ;
- Pour la liaison vidéo, Le 1,2Ghz et le 5.8Ghz sont maintenant les plus répandues ;
- Le 1.2 est une fréquence radio amateur donc soumis à un règlement. Cependant, il est qd même utilisé pour sa capacité à mieux "traverser" les obstacles du fait de sa fréquence plus faible que les 2 autres. Il reste rapide pour fournir une qualité d'information en adéquation avec les besoins. Une puissance faible de 200mW à 600mW sont généralement utilisés ;
- Le 1.2 peut potentiellement être perturbé par le 2.4 (rare mais possible) ;
- Le 5.8 est de plus en plus utilisé car il nempiète pas sur la fréquence des radios amateurs, les puissances doivent être plus élevées qu'en 1.2 ou 2.4 (donc batterie d'alim plus importante). Il passe très mal à travers les obstacles, grace à sa haute fréquence, il véhicule bcp d'info numérique (bon) ;
- La puissance a peu d'influence sur la portée ;
- Les antennes ont une grande influence, les omnis 3dbi sont la basse mais ne rayonne pas comme une sphére mais comme une pomme ou un donut. Donc attention à l'alignement de l'antenne ;
- Plus l'antennes à de gain (dbi) plus elle est directive. Càd que si le modèle sort du cadre, plus de retransmission au sol !
- En 5.8, la qualité de l'antenne est très très importante (le petit bout conducteur servant d'antenne doit être coupé avec une grande précision << au mm. Pour les autres fréquences citées, on parle de mm et cm...) ;
- En 5.8, il est conseillé d'avoir un système de tracking et diversity. Le tracking permet à une antenne directive de suivre le modèle grace à l'emport d'un gps. Le diversity switch sur l'antenne la mieux disante. La diversité peu être obtenue avec une antenne directive (8dbi à 15dbi) et une antenne omni. ;
- Les câbles rallonges pour les antennes sont à éviter sauf ceux de très bonnes qualité mais très chers ;
- Des fréquences plus basses existent, proche du 800/900 Mhz.
Concernant le système de stabilisation :
Le moins cher qui donne des résultats corrects mais demande pas mal de manip :
- Projet multiwii (environ 40 la carte controleur).
Dans le haut de gamme il y a le dji wookong mais il y a aussi le ZeroUAV. Beaucoup moins cher (la version pour quadri rotor est à environ 550) avec plus de fonction que le wookong à 1000 avec un même niveau de stabilisation.
Il faut absolument opter pour un système bénéficiant d'un retour maison en cas de perte visuel ou de controle.
Concernant la transmission et le pilotage de l'apn.
Je ne connais pas le 650D, mais je serai surpris qu'il ne dispose pas de la prise télécommande en jack 2,5mm. L'interfaçage avec le récepteur RC est très simple avec un circuit type Arduino. Pour la vidéo, il n'y a pas de sortie composite en jack également sur le 650D ? si c'est le cas dommage, sinon l'émetteur video se branche facilement dessus. Autre possiblité, il existe des convertisseur hdmi / composite. Ce qui permet le branchement d'un émetteur video traditionnel.
Si jamais il y a un émetteur hdmi sans fil, attention, la transmission sans fil d'une video composite est déjà très compliquée, alors le hdmi.. à part peut être avec du matériel pro...
Il y a encore bcp de chose à dire sur le sujet, mais c'est une véritable passion chez moi (RC, robotique, électronique, etc.) donc désolé si vous trouvez cela lourd
Une dernière chose, la porté peut aller très loin (avec peu d'investissement, entre 5 et 10 km (sol / air)). Il faut cependant amplifier le signal de l'émetteur RC. Bien sûr, cela ne respecte pas la réglementation.
bonne semaine...
ludovic

Informations de la discussion
Utilisateur(s) sur cette discussion
Il y a actuellement 1 utilisateur(s) naviguant sur cette discussion. (0 utilisateur(s) et 1 invité(s))
Discussions similaires
-
télécommande et déclenchement à distance
Par SG69 dans le forum Matériels DiversRéponses: 6Dernier message: 21/04/2012, 19h04 -
Déclenchement à distance
Par poukill dans le forum Matériels DiversRéponses: 12Dernier message: 15/11/2011, 22h32 -
Déclenchement à distance pour 40D
Par jdusat dans le forum Matériels DiversRéponses: 4Dernier message: 12/01/2008, 16h06 -
Declenchement d'un 580 a distance.
Par tsuki kage dans le forum Discussions FlashRéponses: 2Dernier message: 18/06/2007, 15h09
